Electronic systemata stabilizationis (ESP, AHS, DSC, PSM, VDC, VSC)
 Haec systemata obtinent ut vehiculum tuto in rebus dubiis, praesertim cum in angulo. In motu, systemata pluribus indicibus aestimant, ut celeritatem vel rotationem rotae gubernantis et in eventu periculi lapsus, systemata currus ad pristinum suum directionem redire per singulas rotas frangendo potest. In vehiculis pretiosioribus, stabilitas systematum temperantiae activum chassis inducunt quae ad superficiem aurigae aptat et stilum impellit et amplius confert ad salutem agendam. Plurimi cars notati ratio in suis vehiculis utuntur. ESP (Mercedes-Benz, Skoda, VW, Peugeot et alii). Cum notati ahs (Active ratio processui) a Chevrolet in suis vehiculis usus; Canon EOS (Dynamic securitatis imperium)BMW, PSM (Ruerat Stabilitas Ratio Management), V DC (Vehiculum motus dynamics) in Subaru cars installatur, VSC (Vehiculum stabilitatis imperium) etiam in Subaru ac Lexus vehiculis instituitur.
Haec systemata obtinent ut vehiculum tuto in rebus dubiis, praesertim cum in angulo. In motu, systemata pluribus indicibus aestimant, ut celeritatem vel rotationem rotae gubernantis et in eventu periculi lapsus, systemata currus ad pristinum suum directionem redire per singulas rotas frangendo potest. In vehiculis pretiosioribus, stabilitas systematum temperantiae activum chassis inducunt quae ad superficiem aurigae aptat et stilum impellit et amplius confert ad salutem agendam. Plurimi cars notati ratio in suis vehiculis utuntur. ESP (Mercedes-Benz, Skoda, VW, Peugeot et alii). Cum notati ahs (Active ratio processui) a Chevrolet in suis vehiculis usus; Canon EOS (Dynamic securitatis imperium)BMW, PSM (Ruerat Stabilitas Ratio Management), V DC (Vehiculum motus dynamics) in Subaru cars installatur, VSC (Vehiculum stabilitatis imperium) etiam in Subaru ac Lexus vehiculis instituitur.
Abbreviatio ESP est ex Anglica Progressio stabilitatis electronicae and stands for programmatis electronicae stabilitionis. Ex nomine ipso patet hoc esse repraesentativum aurigae electronici adiutorum secundum stabilitatem mittentes. Inventio et exsecutio subsequentis ESP in autocineto industria interruptio fuit. Similis res semel facta est cum introductione ABS. ESP adiuvat imperitos et peritissimos aurigae ambitum cum aliquibus condicionibus criticis quae forte agitantes oriri possunt. Plures sensoriis in notitia autocinetorum in autocineto agitatorum. Haec notitia comparatur per modum unitatis cum calculata notitia pro modo incessus recto. Cum differentia deprehenditur, ESP automatice reducitur et vehiculum stabilit. ESP utitur aliis systematibus electronicis ad suum munus. Praecipui operarii electronici includunt systema braking anti-cincinni ABS, systemata anti-skid (ASR, TCS et alii) et consilium de operatione sensoriis necessariorum ESP.
Systema machinarum a Bosch et Mercedes evoluta est. Prima raeda cum ESP instructa erat S 1995 luxus coufe (C 600) mense Martio 140 . Paucis post mensibus, ratio etiam iter fecit ad classicum S-Class (W 140) et SL Roadster (R 129). Pretium huius systematis tam altum fuit ut primum systema solum vexillum in compositione cum machina summo 6,0 V12 duodecim-cylindrici, aliis tormentis ESP tantum pro hefty surcharge oblatum est. Realis BUTIO in ESP debebatur ut videtur rebus parvis et quodam modo congruentia. Anno 1997, diurnarii Suecici firmitatem tunc novitatis duxerunt, quod Mercedes A. Ad omnium praesentium admirationem, Mercedes A cum alces experimento sic dictos obire non potuit. Hoc initium negotii notavit, quod artifices productionem paulisper suspendere coegit. Conatus technicos et designatores apud Stuttgart Plantam automobilem invenire rectam solutionem problematis coronati sunt. Ex multis probationibus, ESP vexillum Mercedis pars facta est. Hoc, vicissim, incrementum huius systematis significavit ab exspectatione decem milium usque ad centenos milium et plus parabilis pretiis praestari posse. ESP viam usui in parvis et in vehiculis patefecit. Nativitas ESP vera revolutionis in agro pulsionis tutae fuit, et hodie relative divulgata est non solum gratia Mercedes-Benz. Existentia ESP, quae augetur et nunc maxima fabrica est, multum contulit ad exsistentiam ESP.
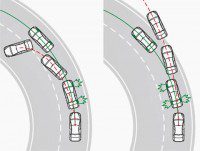
In plerisque systematis electronicis cerebrum electronic unitas est, et hoc non ita est cum ESP. Negotium unitatis moderandi est valores actuales ex sensoriis comparare cum valores calculi dum aurigabat. Directio requiritur ad angulum rotationis et velocitatem rotationis determinatur. Condiciones actuales incessus computantur secundum accelerationem lateralem et rotationem vehiculi circa axem verticalem suum. Si deviatio a valoribus computatis deprehensus est, processus stabilizationis reducitur. ESP operatio torques machinae moderatur et systema bracis unius vel plurium rotarum afficit, eo quod motus vehiculi inutiles eliminat. ESP potest corrigere understeer et praepositus cum cornering. Vehiculum understeer corrigitur per rotam interiorem braking. Praepositus corrigitur per fracturam frontis externam rotam. Cum datam rotam frangunt, copiae braccae in illa rota in stabilizatione generantur. Secundum legem simplicem physicae, hae bracae vires torques circa axem verticalem vehiculi efficiunt. Aureus inde proveniens semper motus inutiles renititur et sic vehiculum in partem desideratam cum angulis reddit. Etiam currum in rectum vertit, cum non se vertat. Exemplum operationis ESP angulum celeriter est cum axe anteriori cito angulum exit. ESP primum torquem machinam reducit. Si haec actio non sufficit, tergo interior rota frangitur. Processus stabilizatio pergit usque dum tendentia ad skid reducitur.
ESP fundatur in potestate unitatis quae communis est cum ABS et aliis systematibus electronicis ut EBV / EBD vis distributoris fregit, torques ordinator machinae (MSR) et systemata anti-skid (EDS, ASR et TCS). In potestate unitas processuum datarum 143 vicibus secundis, id est, singulis 7 millium secundis, quae paene 30 vicibus velocior est quam humana. ESP numerum sensoriis ad operandum requirit, ut:
- sensorem palam fregit (informat imperium unitas cuius coegi est braking)
- singula rotae velocitate sensoriis;
- gubernaculo rota angulus sensorem (determinat requiritur directionis peregrinatione)
- acceleratio sensoris lateralis (adscripta magnitudinem virium lateralium agentes, ut vis centrifuga in curva);
- Vehiculum gyrationis sensorem circa axem verticalem (aestimare rotationem vehiculi circa axem verticalem et statum currentem motus determinare);
- pressionem sensorem fregit (determinat pressionem currentem in systemate fracto, e quo vires braccae et proinde vires longitudinales in vehiculo iniri possunt);
- acceleratio sensoris longitudinalis (solum quattuor rotarum coegi vehiculis).
Praeterea ratio braking requirit additam pressionis fabricam quae pressionem applicat cum auriga non frangit. Unitas hydraulica pressura fractos distribuit ad rotas confregit. Commutatio lucis fregit ordinatur ad luminaria fregit si agitator non fregit cum ratio ESP in die est. ESP interdum per bullam in ashboardday demoveri potest, quod commodum est, exempli gratia, cum catenis nivis incessus. Declinatio vel ratio indicatur per indicatorum lit in tabulis instrumenti.
ESP permittit vos ut physicorum legum fines du- trudatis et sic activam salutem augeatis. Si omnes currus cum ESP instructi essent, circiter decima accidentium vitari potuit. Ratio constanter obsistit stabilitatis nisi avertit se. Sic agaso maiorem securitatem habet, praesertim glacialis et nivalis. Cum ESP directionem peregrinationis in optatam directionem corrigit ac deflexionum per iaculationem causarum compensat, significanter periculum accidentium in rebus dubiis minuit. Tamen in uno spiritu animadvertas oportet recentiores etiam ESP rectorem temerarium non servaturum qui leges physicae non sequetur.
Cum ESP negotiatio Bosch et Mercedis est, alii artifices aut systema Bosch et nomine ESP utuntur, aut systema suum suum explicaverunt ac acronymo diversa utuntur.
Acura-Honda: vehiculum stabilitas Imperium (VSA)
Alfa Romeo: Vehiculum Imperium Dynamic (VDC)
Audi: Electronic Stabilitas Programma (ESP)
Bentley: Electronic Stabilitas Programma (ESP)
BMW: vrátane Dynamic Tractio Control DSC
Bugatti: Electronic Stabilitas Programma (ESP)
ьюик: StabiliTrak
Caesar: StabiliTrak et Active gubernaculo (AFS)
Chery Car: Electronic De stabilitate Programma
Chevrolet: StabiliTrak; Active pertractatio (Lin Corvette)
Chrysler: Electronic Stabilitas Programma (ESP)
Citroën: Electronic Stabilitas Programma (ESP)
Ictos: Electronic De stabilitate Programma (ESP)
Daimler: Programma de stabilitate Electronic (ESP)
Fiat: Electronic Stabilitas Programma (ESP) et Vehiculum Dynamic Imperium (VDC)
Ferrari: Constitutum Imperium (CST)
Ford: AdvanceTrac with Roll Over Stability Control (RSC), Vehiculum Interactive Edidit (IVD), Programma Stabilitas Electronic (ESP) et Dynamic Stabilitas Imperium (DSC)
Motorum Generalium: StabiliTrak
Holden: Programma de stabilitate Electronic (ESP)
Hyundai: Electronic Stabilitas Programma (ESP), Imperium stabilitatis Electronic (ESC), Vehiculum Stabilitas Assisi (VSA)
Infiniti: Vehiculum Dynamic Control (VDC)
Jaguar: Dynamic Stabilitas Control (DSC)
Jeep: Electronic Stabilitas Programma (ESP)
Kia: Imperium stabilitatis Electronic (ESC) et Programma stabilitatis Electronic (ESP)
Lamborghini: Programma stabilitatis Electronic (ESP)
Renault Vel: Dynamic De stabilitate Control (DSC)
Lexus: Vehiculum Procuratio Integrated Edidit (VDIM) et Vehiculum Stabilitas Imperium (VSC)
Lincolniensis: AdvanceTrac
Maserati: Maserati Stabilitas Programma (MSP)
Mazda: Dynamic Stabilitas Control (DSC), vrátane Dynamic Tractio Control
Mercedes-Benz: Electronic Stabilitas Programma (ESP)
Mercurius: AdvanceTrac
MINI: Dynamic De stabilitate Imperium
Renault Vel: Multi-modus Active De stabilitate Control et Tractio Control a Active De stabilitate Imperium
Nissan: Vehiculum Dynamic Control (VDC)
Oldsmobile: Subtilitas Control System (PCS)
Opel: Electronic Stabilitas Programma (ESP)
Peugeot: Programma de stabilitate Electronic (ESP)
Pontiak: Stabili Trak
Porsche: ruerat stabilitas Imperium (PSM)
Proton: electronic progressio stabilizationis
RENAULT: Electronic Stabilitatem Programma (ESP)
Rover Group: Dynamic Stability Control (DSC)
Renault Vel Satis: Electronic De stabilitate Programma (ESP)
Saturn: StabiliTrak
Scania: Programma stabilitatis Electronic (ESP)
SEDES: Electronic Stabilitas Programma (ESP)
koda: Electronic Stabilitas Programma (ESP)
Dolor: Electronic Stabilitas Programma (ESP)
Subaru: Vehiculum Edidit Imperium (VDC)
Suzuki: Electronic Stabilitas Programma (ESP)
Toyota: vehiculum Edidit Integrated Management (VDIM) et Vehiculum Stabilitas Imperium (VSC)
Vauxhall: Electronic Stabilitas Programma (ESP)
Volvo: Dynamic Stabilitas et Tractio Control (DSTC)
Volkswagen: Programma stabilitatis Electronic (ESP)
