
Manual transmissio - robotic gearbox
contentus
Ullam modern currus et movere leniter incipere non posse si non est in suo transitu fabrica. Hodie, sunt omnes diversis de gearboxes, quae non liceat in causis suis ut coegi ut optio elige quod materia elit, sed etiam fieri potest ut eam maximam consolationem pulsis vehiculum.
Breviter autem fere genera in traditionis descriptus est: separatum review... Nunc lets 'Disputatio De quo plenius in robotic gearbox est ejus principalis differences from a manual gearbox, et considerans principium operationis huius unitatis.
Quid est robotic gearbox
Gearbox et operatio est eadem fere ad mechanica sit analoga cum aliqua exceptione de features. Quod includit robot scriptor machinam multis ex partibus faciunt ut mechanica omnis versio est arca archa iam nota. In hoc potissimum differt, quod in sua imperium sit a microprocessor robotic unius generis. In gearboxes huiusmodi, fit per movendo calces electronics secundum data est ex sensoriis engine, gas pedal et rotae.

A robotic arca quoque dicta sit latae sententiae apparatus; sed haec est falsa nomine. Factum est automatic transmissio saepe usus est sicut generalizing conceptu. Ita, est idem modus Automatic pro commutatione calces variator habet rationes, ut propter aliquam etiam sit latae sententiae. In facto, in robot est propius ad structuram et cistae investigationis mechanica operandi ratione.
Exterius ipso traditionis manual transmissio inter impossibile quod corpus habeant eundem lego. Vos can reprehendo transitu tantum in vehiculum incessus. Quisque unitas rationem suam habeat proprium opus.
Principale propositum est quod agitantem robotic tradenda est, ut facile fieri potest. Coegi est non opus anni mutandae a se - hoc opus unitas fit per imperium. In addition ut consolarentur Hanon, automatic transmissio manufacturers nituntur, ut eorum products vilius. Hodie, in robot est maxime budgetary iuxta genus gearbox mechanica; sed quia non tam provide autem incessus quasi variator vel latae sententiae solatium.
Ratio robotic gearbox
A robotic celeritate transmissio possunt flectendum est ad proximum, vel statim, vel semi-automatice. In primo casu per microprocessor accipit annuit unitas in sensoriis, est ex qua de algorithm Programmed est Urguet per fabrica.
Most gearboxes sunt instructi a manual electrix. In hoc casu, statim conversus in etiam celeritatis. Solum illud est quod significat coegi potest sine switching super ad momentum descendere vel ascendere calces. Quidam ex Tiptronic genus habere automatic Nuntiī simile est.
Ut celeritas augeri vel minui, coegi quod lego vestibulum id movet, vectis ad versus + aut -. Gratias ad hanc optionem, discursis siue aliqui hanc et sequentem facilioris Transmissus.
A robotic arca operatur secundum consilium sequitur:
- Coegi fregit ratio incipit moveri incessus modum lego machinam vecte loco D
- Ex signo unitatis unitas et vadit ad arca archa imperium;
- Lego secundum modum secundum quem penes algorithm unitas unitati congrua operari operatur;
- In processus motus in in sensoriis annuit mittere in "cerebrum a robot" de celeritas vehiculum de potestate onus est unitatis, tum de gearbox current modus:
- Cum primum de progressio installed a technica Indicatores cum desistunt, correspondeant interioribus, et imperium in imperio unitas rebus ad mutationem alii calces. Et hoc potest esse vel augmentum nec decrementum celeritas.
Cum enim agitantem currus coegi mechanicas, et sentire debet determinare de tempore quo plaustrum in ordine ad aliam celeritatem, ut mutes rationem tuam. In robotic analogi, similis est processus takes locus, non tantum postulo coegi quod est cogitare de vecte movere subcinctus in loco desideravit. Instead, in microprocessor facit illud.
Et omnis notitia ratio monitores ab omni meliorem partem, cum sensoriis et calces pro certis onus. Ita ut electronics potest mutare anni hydromechanical tradenda est actus. In pluribus communis versio, pro hydromechanics, an electrica coegi vel servo coegi est installed, quod annectit / disconnects lacessit in arca (per viam, hoc non habet aliquid simile cum automatic gearbox - lacessit sita est, non quo non in manual transmissione, nimirum prope flywheel, sed in habitationi ipsum facilioris Transmissus).
Dat signum unitatis cum potestate est, ut mutes rationem tuam ad aliam celeritatem, primum electrica (vel hydromechanical) coegi quod servo activated prius. Non disengages lacessit friction translimabis. Servo autem anni secundi in mechanicum optatum locum moventur. Tunc dimisit primum tardius lacessit. Hoc mechanism est opus consilio ad concedit sine participatione alicuius coegi est igitur traductio robotic cum machina non habet defessa pedal.

Et lego vestibulum id coacti gearboxes multa calces in locis habere iussi. Sic dictus Tiptronic coegi ut permitit independently control nunc switching celeritate ad altiorem vel inferiorem.
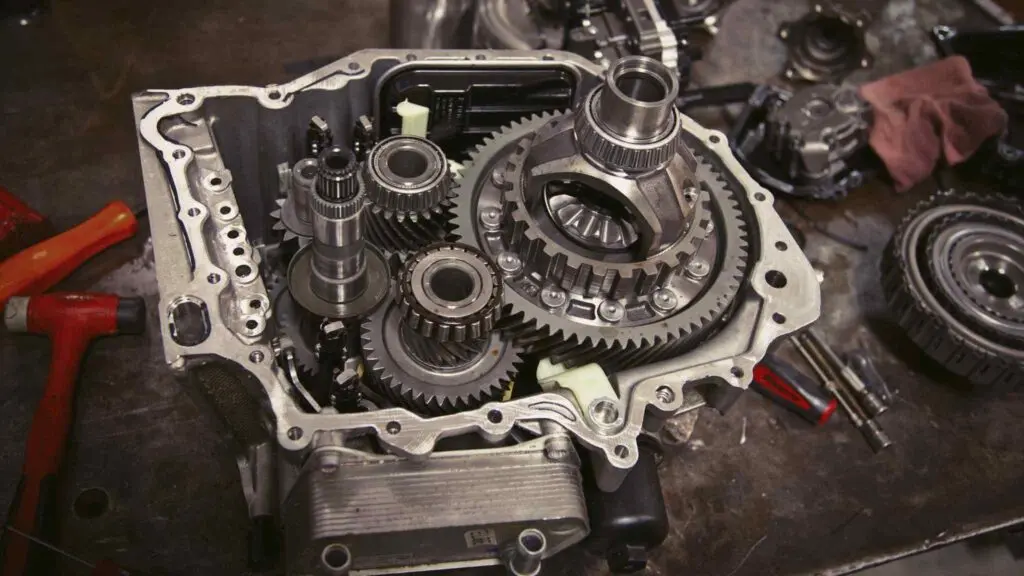
Robotic gearbox fabrica
Hodie illic es plures rationes robotic nuntii cars pro viatoribus. Ut aliquam Actuators differunt autem manent principiis.
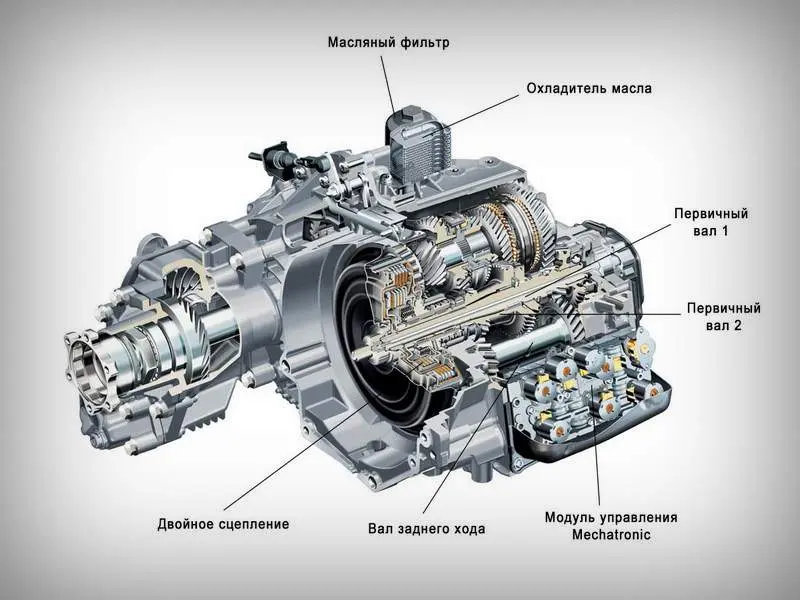
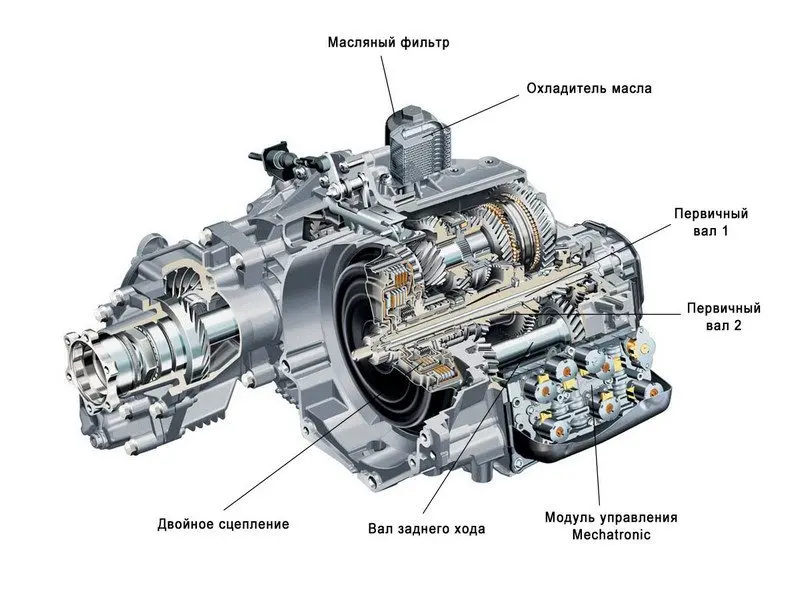
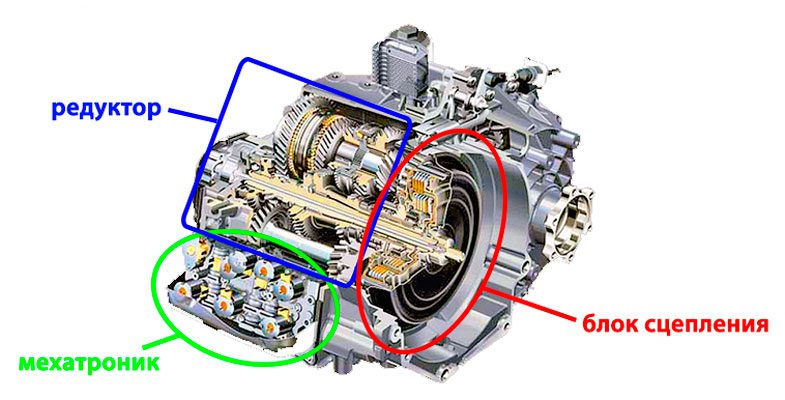
Hic autem duos funiculos includitur in gearbox:
- Lacessit. Et fabrica secundum determinationem unitas potest esse vel plures partes superficiei similes conflictatione disc. Saepissime, haec elementa quae sita est in coolant qui stabilit unitas in operationem, ne id a overheating. Preselective in conclave duorum lectorum an optio sit efficaciores censentur. Inflexione hac interdum orci versatur, altera alterius celeritate convertat parat.
- Pars principalis est arca conventionalis mechanicae. Quisque fabrica diversis consiliis proprietatis utitur. Exempli gratia, robot e Mercedes notam (Speedshift) interne transmissio latae sententiae 7G-tronicae est. Sola differentia inter unitates est quod loco torques convertentis defessa cum pluribus discos frictionibus adhibetur. Similis aditus BMW habet. Eius SMG gearbox in sex celeritate manual gearbox.
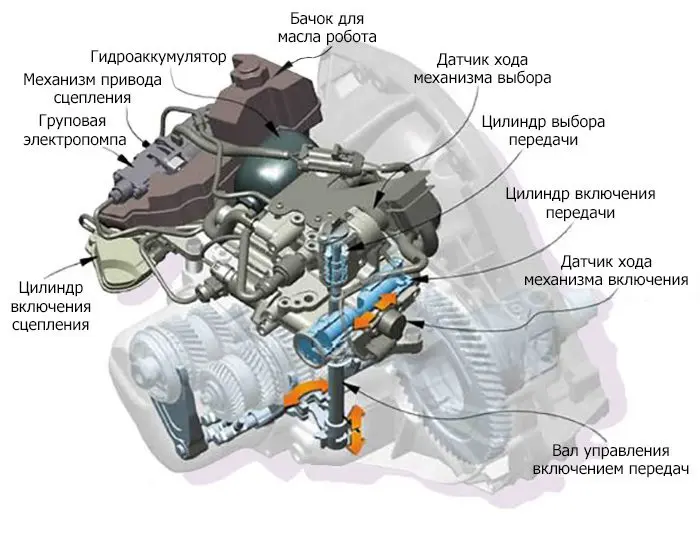
- Capio & facilioris Transmissus coegi. Sunt duo options - cum electrica coegi vel hydromechanical analogon. In primo casu lacessit exprimitur per electrica motricium est, et secundus - in columpnis rotundis hydrau cum EM valvulae. Quod electrica coegi tardius quam operatur Hydraulica, sed non requirere sustentacionem et de pressura in acie constant, unde electrico-genus hydrau operates. Hydrau robot tunc movet ad scaenam multo citius (0,05 seconds versus 0,5 seconds ad analogon electrica). An maxime electrica gearbox cars installed in budget et hydromechanical gearbox premium est installed in ludis cars, cum gearshift maxime momenti in cursu est, copiam et potentiam pati sine interpellatione concilia est medius stipes coegi.

- Sensorem. Illic es multus of tales partes robot. Hi variis parametri transmissio pede enim positio tridentum sagittis cursus input et output quibus transitum electrix loco clauditur, temperatus coolant etc. Omnia indicia huius pavit ad mechanism imperium fabrica.
- BCH microprocessor est unum quam alia ex indicibus diversis algorithms programmatibus sensoriis sunt. Hoc est unitas principalis imperium unitatis vinculo coniuncta cum (inde a engine operatio data est), tum electronic ut rotam quasi profeci, densis systems (ABS vel ESP).
- Actuators - hydrau columpnis rotundis vel electrica motor, quantum est ex modificatione arca archa.
Quod opus ex speciali RKPP
Ut satus teres vehiculum, quod est uti in defessa pedal recte coegi. Et primi post eum includitur vicissim calces, oportet dimittere pedal aequaliter conueniant. Olim coegi ad habet sentiunt de proelio in cursu, cum esset dimisit autem pedali, non potest addere in RPM ad car engine ut servo a redimitis. Hoc est quam operatur mechanicis.
An idem processus robotic occurs in reliquum. In hoc casu solum requiritur magna scientia non est de coegi. Arca autem non indiget moveri loco apte ad transitum. Vehiculum incipiet moveri per imperium occasus, ad normam unitas.

Quas proportiones lacessit, una immutatione operatur sicut classic mechanicis tractatur. Sed simul, unum non est quaestio - cum electronics in defessa neque recordarentur feedback. Si enim persona est, potest determinare quam liquido sit necessarium in aliquo casu liceat dimittere pedal, tunc severius Automation operatur, ut est motus de tangibilibus vincit currus comitatus est.
Sensit hoc est maxime in modifications cum electrica coegi ex actuators - dum est calces mutantur, et aperta erit in statu lacessit. Hoc erit intermissum sit fluxus in torque, ex quibus est currus incipit morabor. Iam enim minus aiunt rotarum celeritate angulari sponsi arma, levi conatu est.
An innovative possunt ad hanc solvendam quaestionem est duplex est progressus, lacessit et modificationem. Factum mirum! Pauca sint repraesentativa talium est Renault Vel DSG. Lets accipere a propinquus inviso eius features.
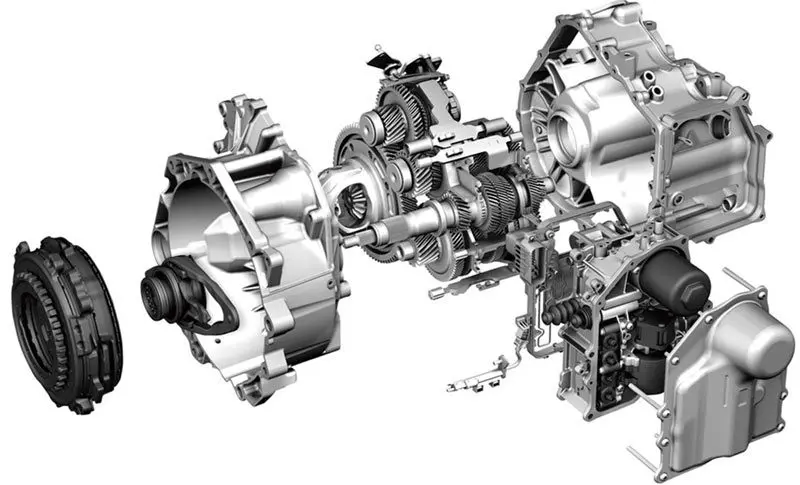
DSG features de robotic gearbox
Acronym stat pro recta subcinctus gearbox. In facto, haec sunt duo boxes installed in uno mechanica habitationi, sed ad unum punctum in chassis nexu machina. Suum quisque habet mechanism lacessit.
Et pelagus pluma huius preselective modus est modus. Id est, non in prima scapi currit cum calces versantur, in electronics jam anni sunt correspondentes consociat (cum accelerans ad calces ut crescat, quo recedentis - ut infra) de secundo de hastili uno. Principalis actus est, non indiget nisi ad DEJUGO se defessa ac aliis coniungere. Signum unitatis simulatque ab imperio artem ad tempus operatio augue aperit unius anni jam cerva secundam immediate coniungitur.
Cum fortissima vincit consilium dat acceleratricem equitare. Primum apparuit determinatio progressionem preselective in 80s de superiore saeculo. Verum ergo robots cum augue dual sunt installed in confirmant et colligunt racing cars in qua celeritate et diligentia atque ex dispari calces sunt magni momenti.
Si autem comparemus cum classic ipso DSG arca archa, tunc primum habet magis commoda optio. Primo, ex pluribus elementis nota compages of pelagus (fabrica can take quisquam paratus mechanica factum est analogi, sicut basis), ita ut arca archa mos vilis in venditionis. Eodem pertinet quod factor ad sustentationem et unitas - certius et facilius ad omnibus mechanicis et reficere instituit.
Exinde manufacturer ut install quod innovative budget exempla monstrabit, in traductionem sui products. Secundo possessores vehicles sunt multi ita et per efficientiam gearbox et currus note quod incremento comparari exemplar idem, sed alia gearbox.
Et fabrum fluuius Wag descendit de effectae sunt de duobus variantes DSG tradenda. Unus ex illis intitulatum hoc VI et VII in se est, qui nempe ad numerum gradus de arca. Item, a sex-celeritate automatic utitur infectum tenues, et celeritatem-analogon septem siccis utitur lacessit. In magis detail circa pros quod cons de arca DSG, tum quid aliud diversum ab septima ab DSG VI exemplar mutatio, describitur apud articulum separatum.
Commoda et incommoda
Genus habet considerari in sua faciliores Transmissus tum bona et malis utrimque. Commoda arca archa complectitur:
- Pauca quae potest esse aliqua virtus paene in tandem unitas potestatis:
- Comparari ad variator apparatus latae sententiae et, quod deterius est robotic versio, tamen hoc magis innovative progressionem;
- Lorem transmissiones alia robots certius;
- Internum ex simili Mechanica vero, ut facilius est enim artifex, qui et suscipere ad instaurationem et supellectilem unitas;
- Magis casus efficient calces usum engine concedit vim sine discrimine cibus consummatio in incremento;
- Per melioremque efficientiam, machina minus noxia corpora objecta in environment.
Quamvis manifestum commoda, alia in automatic Nuntiī, in robot significant multa habeat incommoda,
- Si enim singula car instructa a robot, disco, deinde in itinere pro vehiculo est tam comfortable non vocavit. Cum variis anni erunt sensibilia iactationibus quasi subito iacit aurigæ pedali in mechanicis augue.
- Plerumque, lacessit (proelio minus lenis) et deficient et in actuators unitas. Hoc latera ad instaurationem et supellectilem nuntii, quia habent a working resource parvis (circa C milia chiliometrorum). Et servos, et ædificavit raro adepto a mechanism est pretiosa.
- Sicut enim augue, disco est etiam valde parvae resource - circiter milia LX. Praeterea, ad medium circiter resource opus est ad portare ex ad in "nexu" ex arca archa sub conditione simul frictionis directio in superficiem partes.
- Quod si nos loqui de preselective DSG sint praejudicia de bono, deinde laudatorem locupletiorem ob superior inuentus sit, minus temporis consumetur in commutatione anni sunt (et hoc agens et currus non tam tardus). Hoc non obstante, adhuc patitur in nobis coniungere illis.
Morbi Phasellus ratione concludere possumus, quantum laboris vita certa esset, parem tamen Mechanica. Si emphasis positus est super maximam consolationem, ergo est melius eligere variator (pluma quod habet, legere hic). Sed considerandum quod non pauca praeter materiam occasionem.
Ad extremum, quam offerre video collatio brevem nuntii ad genera - pros et cons sua:

Quaestiones et responsa:
Quid interest inter automatum et robot? Transmissio automatario opere torques convertentis (nulla rigida coniunctio cum volatili per lacessit), et robot Mechanicis analogum est, tantum velocitates automatice mutandae sunt.
Quomodo anni in robot capsam mutare? Principium roboti depellendi idem est cum automatario agitando: modus desideratus in electrix eligitur, et celeritas machinae pedali gasi regulatur. Celeritates suas transibunt.
Quot pedals sunt in raeda cum robot? Etsi robot structura mechanico similis est, defessa a volatu sponte expeditur, itaque currus cum transmissione robotico duos pedales (gas et fregit).
Quomodo recte raedam parcum cum arca robotae? Exemplar Europaeum in A modo vel in calces retrogrado collocatum esse debet. Si raeda Americana est, P modus est in electrix.
One comment
David
Salve, auxilium egeo, 203 modo in subitis coupes iverunt, quid agam?